Blade Access Process
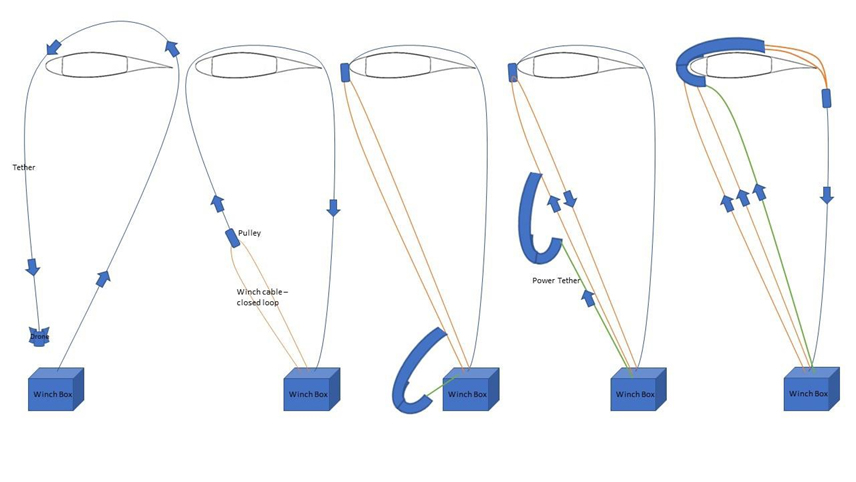
We use a winching system and a DJI 1000 drone to fly a tether rope over the wind turbine blade. We then use a winch to pull the winch cable, the robot, and the power tether to the blade. A similar process is used to remove the robot from the blade. The tether lines remain connected to the robot at all times.
Inspection: Location Tracking & Camera Vision Systems
The location tracking system determines the robot’s location when initially secured on the blade and tracks its position as it moves along the blade. It also logs the locations of damage identified by the camera vision system.
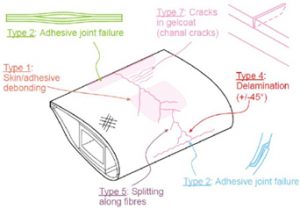
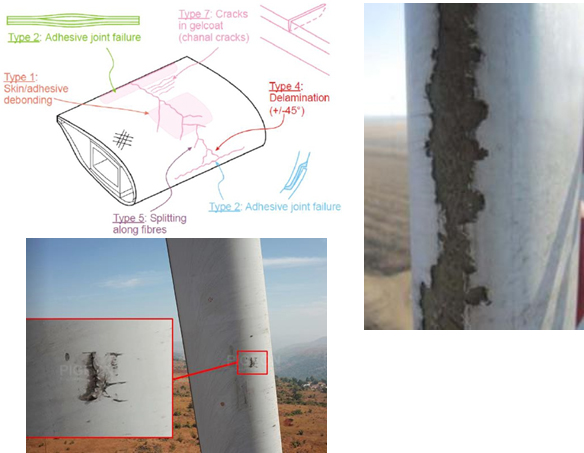
The camera vision system is designed to determine the locations of type 1 and 2 blade damage. The data collected will be used to help control the painting system so it properly fills in damaged areas with multiple layers of 3D printed UV cured paints and coatings.
Blade Cleaning
We use an ablative laser to clean the blade. In addition, our offshore version has an additional cleaning capability to remove salt contamination from the blade.
Blade Repair
Robowind’s robot has the ability to apply a variety of paints and coatings that are air or UV light cured. In addition, the robot has the capability to 3D print multiple layers of UV cured paints both to repair erosion damage and to print vortex generators and other performance enhancements. We are currently able to repair Type 1 and 2 blade damage and are working to develop the capability to repair other types of damage.